













Dans cet article nous suivons l'exemple de Léon Foucault qui fournit en 1851 la première confirmation expérimentale convaincante de la rotation diurne de la Terre, confirmant ainsi, si besoin était, un élément crucial du modèle héliocentrique du système solaire. À défaut d'un pendule de 28 kg et d'une hauteur sous plafond de 70 mètres pour le suspendre, nous utilisons un dispositif qui tient sur un coin de table et dont les principaux composants sont un joystick à détection de mouvement PlayStation Move et une platine tourne-disque 33/45 tours.
Avec une durée d'acquisition de plusieurs heures, notre appareil aura peu d'applications pratiques. Il s'agit néanmoins d'une expérience de physique instructive et facile à réaliser. Les détails techniques et du code source sont fournis. Les lecteurs qui préféreraient s'épargner la phase de bricolage trouveront également des données expérimentales brutes.
D'après nos lectures (Annexe A, Contexte historique ), toutes les confirmations expérimentales antérieures de la rotation de la Terre requéraient des instruments coûteux ou fabriqués sur mesure avec soin - y compris le pendule, malgré son apparente simplicité. Avec quelques améliorations (Section 8, « Perspectives »), notre approche permettra à des millions d'individus de confirmer par eux même la rotation de la Terre, pour un coût et un effort négligeables, sans compétences techniques pointues, en utilisant exclusivement des produits de consommation courante - une démocratisation de la révolution copernicienne rendue possible par l'industrie électronique grand public.
Ce projet a été développé sans le concours des fabricants des appareils concernés. Les informations techniques contenues dans cet article sont tirées de nos propres tests et n'engagent personne d'autre.
Le PS Move est commercialisé comme un périphérique compatible avec Bluetooth (une norme ouverte qui encourage l'interopérabilité entre les ordinateurs et les périphériques sans fil), et nous estimons que cette expérience l'utilise conformément à son objet initial (la détection de mouvements). Il n'est pas nécessaire de modifier l'appareil ou de contourner une quelconque mesure de protection. Malgré cela, le fait de suivre ces instructions est susceptible d'invalider votre garantie, d'endommager votre matériel, ou pire encore. À vos risques et périls !
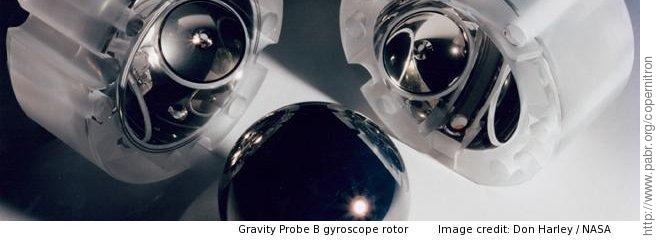
Les gyroscope sont longtemps restés l'apanage de systèmes de navigation sophistiqués pour aéronefs, sous-marins nucléaires, lanceurs spatiaux et missiles balistiques.
Ces dernières années, grâce à la production à grande échelle de microsystèmes électromécaniques, ils ont envahi notre vie courante. Des gyromètres MEMS sont présents dans des millions de caméras vidéo, récepteurs GPS, téléphones mobiles et joysticks pour jeux vidéo.
Du fait de leur principe de fonctionnement, les gyromètres mesurent leur vitesse de rotation, non pas par rapport au sol, mais par rapport à un référentiel galiléen aligné sur les étoiles lointaines. Comme la Terre elle-même est en rotation par rapport à la sphère céleste, un gyromètre MEMS immobile perçoit cette rotation.
Pour les applications grand public dont le but est de suivre l'orientation d'un véhicule ou d'un appareil portatif par rapport au sol, la rotation de la Terre n'est qu'une source d'erreurs de mesures infimes. Cependant, il existe des applications industrielles pour des appareils suffisamment sensibles pour la détecter. En mesurant non pas seulement la vitesse de la rotation, mais aussi la direction de son axe, on obtient la direction du vrai Nord (ou Nord géographique) ainsi que la latitude. Le compas gyroscopique est devenu un instrument incontournable dans les environnements où ni le ciel nocturne ni le champ magnétique terrestre ne peuvent êtres exploités de façon fiable, par exemple sous l'eau (navigation des sous-marins) ou sous terre (forages, cartographie de conduits). Contrairement au gyroscope directionnel, le gyrocompas ne requiert pas une initialisation manuelle et ne dérive pas.
Ce sont des dispositifs sophistiqués qui sont utilisés pour ces applications. Il n'était pas du tout évident, au début de ce projet, que des gyromètres MEMS grand public pourraient détecter la rotation de la Terre, ne serait-ce que qualitativement.





D'après [IFIXIT], le gyromètre du PS Move est un composant étiqueté Y5250H. Ceci nous a paru suspect car le marquage fait penser à un gyromètre de lacet de chez ST (probablement une variante sur mesure de leur LY5150ALH) alors que le PS Move est réputé mesurer les rotations sur trois axes. Nous avons donc démonté notre appareil et découvert une carte imprimée légèrement différente, avec un gyromètre deux axes ST PR425A supplémentaire à l'endroit où IFIXIT avait photographié un composant blindé non identifiable.

Suite à un projet antérieur (voir [LINMCTOOL]), nous savons que le PS Move est un périphérique Bluetooth standard et que ses concepteurs ont eu l'amabilité de ne pas compliquer la norme par du chiffrement ou des encodages exotiques. Les mesures des capteurs peuvent donc être interrogées par n'importe quel ordinateur équipé d'un adaptateur Bluetooth. Les données sont transmises par voie radio sous forme de reports Bluetooth HID.
Les données des gyromètres transmises par Bluetooth suggèrent un taux d'échantillonnage d'environ 176 Hz avec une étendue de mesure d'environ ±3000 °/s et une gamme dynamique de 16 bits, ce qui fournit une résolution de 0,09 °/s. Il s'agit probablement du résultat d'un suréchantillonnage car les détails internes impliquent que six capteurs analogiques sont multiplexés vers deux CANs de 12 bits capables de fonctionner jusqu'à 1 MHz. Les mesures d'un gyromètre immobile ont un écart-type d'environ 0,45 °/s, ce qui donne une densité de bruit de 0,05 °/s/√Hz, conforme à l'état de l'art pour un gyromètre MEMS grand public.
La Terre effectue de révolution en un jour sidéral de 23 h 56 min 4 s, c'est à dire à raison de 0,0042 °/s. Cette valeur est 20 fois plus faible que la résolution du gyromètre, et bien en dessous du niveau de bruit. Un traitement a posteriori des mesures du gyromètre sera donc manifestement indispensable.
Sous les hypothèses usuelles à propos du bruit de mesure, nous devrions pouvoir obtenir une mesure avec une incertitude tolérable simplement en moyennant quelques millions d'échantillons d'un gyromètre immobile aligné dans la direction Nord-Sud. Le résultat serait la somme de la vitesse angulaire de la Terre et d'un offset indésirable. Nous soustrairions cet offset après l'avoir déterminé par une seconde mesure avec le gyromètre aligné dans la direction Est-Ouest (dans laquelle il n'est pas affecté par la rotation de la Terre).
Malheureusement, l'offset d'un gyromètre ne peut pas être éliminé si facilement car il a tendance à dériver de façon lente et imprévisible. La stabilité de l'offset est un paramètre crucial des performances d'un gyromètre. Pour des raisons évidentes, les modèles affichant un offset très stable sont même considérés comme des composants d'armes par la réglementation ITAR.
Dans le cas d'un gyromètre grand public, l'offset dérive en quelques minutes seulement. Nous ne pouvons donc pas espérer obtenir des résultats cohérents entre plusieurs mesures successives durant plusieurs heures chacune.
Dans [MST2005], un moteur pas à pas fait pivoter un gyromètre de 180 ° toutes les 1,8 s, et le gyromètre est échantillonné au repos pendant une fraction de seconde à chaque position extrémale. L'offset reste stable à cette échelle de temps. On parvient donc à l'éliminer en soustrayant un jeu de mesures de l'autre.
[BMR] étudie l'intérêt qu'il y aurait à faire osciller des gyromètres et accéléromètres selon des trajectoires sophistiquées à deux degrés de liberté.
Notre approche est similaire. Au lieu de construire une plate-forme motorisée sur mesure et son système de commande, nous faisons tourner un gyromètre continûment sur une platine tourne-disque du commerce.
En termes de traitement du signal, nous modulons le signal cible par un moyen mécanique afin de l'extraire d'une région bruitée du spectre, puis nous démodulons à la même fréquence avec l'équivalent logiciel d'un amplificateur lock-in. Lorsqu'elle est utilisable, cette technique est couramment employée en présence de bruits à spectre non uniforme, et notamment de bruits à basse fréquence.
La sortie du démodulateur, dans le plan complexe, indique à la fois la vitesse de la rotation de la Terre (multipliée par le cosinus de la latitude) et la direction de son axe par rapport à l'origine des phases de la modulation.

Les platines tourne-disque font de bons instruments scientifiques amateurs car les audiophiles sont exigeants en matière de qualité de fabrication, précision et régulation de la vitesse, vibrations, blindage magnétique des moteurs, etc.
Nous avons fait un premier essai avec l'appareil le moins cher du marché, un modèle à entraînement par courroie. Après l'avoir chronométré à 46 tours par minute au lieu de 45, nous avons conclu qu'il n'avait même pas un moteur synchrone piloté par quartz, et nous nous sommes tournés vers un modèle à entraînement direct d'entrée de gamme (prix neuf 130 EUR). L'appareil à entraînement direct s'est révélé satisfaisant.
Comme nous avons finalement dû programmer des mécanismes de synchronisation robustes, la précision du tourne-disque n'apparaît plus comme un pré-requis indispensable, et nous encourageons les lecteurs a refaire cette expérience avec n'importe quel type d'appareil.
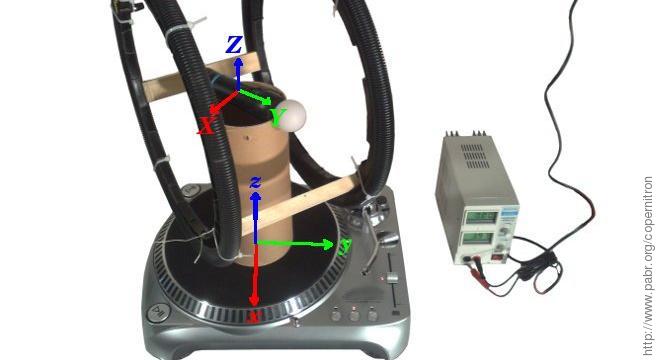
Le PS Move est installé sur le plateau dans son orientation naturelle. La rotation de la Terre pourra être détectée par le gyromètre d'axe X (tangage) comme par le gyromètre d'axe Y (roulis).
Initialement notre dispositif ne donnait pas de résultats concluants. Il a fallu un certain temps pour comprendre que les mesures des gyromètres étaient perturbées par le champ magnétique terrestre. Pour le confirmer, nous avons mesuré la réponse d'un gyromètre immobile à un aimant permanent tournant à proximité.
Nous n'avons trouvé aucune mention d'un tel effet dans la littérature sur les gyromètres MEMS. En fait, il est possible que les champs magnétiques affectent non pas les capteurs MEMS eux-mêmes, mais les circuits électroniques associés.

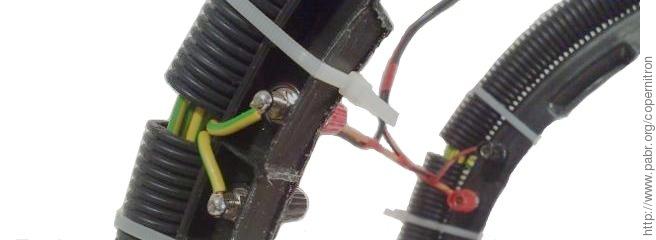
Un blindage magnétique pourrait régler ce problème ; malheureusement il est difficile de se procurer du mu-métal, et une enveloppe métallique perturberait les communications Bluetooth. Nous avons donc préféré utiliser des bobines d'Helmholtz pour annuler le champ magnétique terrestre au voisinage du gyromètre. Nous avons consacré plus de temps que nécessaire à la construction de ces bobines ; une variante rudimentaire à base de fil électrique enroulé autour d'une boîte en carton aurait probablement fait l'affaire.
Le PS Move, l'ordinateur et le tourne-disque ont chacun leur propre horloge, et nous n'avons aucun moyen de les synchroniser directement.
L'ordinateur est synchronisé avec une référence mondiale à l'aide de NTP. Mais comme le système d'exploitation et la pile de protocoles Bluetooth introduisent une latence aléatoire, un horodatage précis de la réception des paquets serait de peu d'utilité. Nous ne profitons donc de la synchronisation NTP que pour mesurer très précisément les fréquences d'échantillonnage et de rotation sur des durées de plusieurs heures.
La fréquence d'échantillonnage du PS Move semble être légèrement affectée par la température (au moins 20 ppm/K d'après un de nos tests). Les échantillons sont transmis accompagnés de ce qui semble être un horodatage, mais nous avons renoncé à l'exploiter et nous supposons simplement que les capteurs sont échantillonnés à intervalles fixes. Le numéro de séquence permet de détecter les pertes de messages sur le canal radio.
Le tourne-disque semble avoir une vitesse de rotation précise et stable, mais pas au point de pouvoir rester en phase avec l'ordinateur pendant plusieurs heures.
Notre traitement du signal par homodynage repose donc sur une boucle à verrouillage de phase qui synchronise le démodulateur logiciel avec la modulation mécanique réalisée par le tourne-disque.
Dans l'implémentation actuelle, la PLL est simplement dérivée d'un autre capteur du PS Move, avec un filtrage à bande étroite autour de 0,56 ou 0,75 Hz. En utilisant un magnétomètre, on aligne la PLL avec le champ magnétique résiduel. (Malgré l'action des bobines d'Helmholtz, les magnétomètres détectent le champ magnétique terrestre car ils tournent à 80 mm du foyer.) En utilisant un accéléromètre, on peut aligner la PLL dans une direction arbitraire en inclinant délibérément le tourne-disque.
En tant que dispositifs mécaniques à base de structures vibrantes, les gyromètres MEMS réagissent non seulement aux rotations, mais aussi aux accélérations linéaires. Les constructeurs savent réduire cet effet indésirable au moyen de paires de masselottes en équilibre, à tel point qu'il n'est même pas mentionné dans les spécifications des gyromètres destinés à des applications grand public. Cependant, même les gyromètres de qualité aéronautique affichent des sensibilités de l'ordre de 0,05 °/s/g. Ceci implique qu'une accélération linéaire de seulement 0,08 g aura le même effet quantitatif que la rotation de la Terre.
Dans notre dispositif, le gyromètre subit l'accélération linéaire de la gravité ainsi que celles liées au mouvement rotatif du tourne-disque. Nous alignons soigneusement l'axe de rotation du tourne-disque dans la direction verticale. Ainsi, dans le référentiel tournant, la gravité et la force centrifuge sont stationnaires, et nous supposons que leur effet est annulé par le processus d'homodynage.
La rotation du tourne-disque agit sur tout gyromètre dont l'axe n'est pas parfaitement orthogonal à celui du tourne-disque. Le processus d'homodynage annule les contributions de sa composante continue et de ses fluctuations aléatoires, mais les éventuelles fluctuations synchrones perturberont directement le résultat final. De telles fluctuations synchrones peuvent être engendrées notamment par :
des frottements dans la mécanique du tourne-disque ;
un plateau chargé de façon déséquilibrée, tournant autour d'un axe imparfaitement vertical ;
des inhomogénéités de courroies ou d'autres pièces similaires ;
le cycle des forces magnétiques dans le moteur.
Figure 10, « Fluctuations de la vitesse de rotation du tourne-disque » : La fluctuation harmonique de rang 16 suggère que le moteur a 16 pôles magnétiques. La composante fondamentale d'environ 1000 ppm est plus préoccupante. Nous n'avons pas déterminé sa cause.
Il devrait être possible d'amortir ces fluctuations mécaniquement à l'aide d'un volant d'inertie relié au plateau par des supports flexibles, mais nos essais avec des matériaux courants n'ont pas donné satisfaction. Nous avons également tenté d'estimer l'amplitude relative des fluctuations en vue de soustraire leur contribution à la mesure démodulée, avec des résultats décevants.
Nous avons finalement choisi de réduire l'effet des fluctuations autant que possible en alignant soigneusement l'axe du gyromètre dans le plan de rotation.Les bobines sont alignées avec la composante horizontale du champ magnétique terrestre. Il n'est pas indispensable de compenser la composante verticale car elle est stationnaire au voisinage du gyromètre, au centre du référentiel tournant.

Le gyromètre de roulis/tangage est situé 22 mm derrière le bouton "PS", dans la moitié supérieure de l'appareil. Il doit tourner au foyer des bobines.
L'inclinaison éventuelle du tourne-disque par rapport à l'horizontale se manifeste par une rotation de la gravité dans le référentiel tournant, ce que nous mesurons avec les accéléromètres du PS Move en utilisant là encore la technique d'homodynage. La fidélité de cette mesure est meilleure que 0,05 ° ; nous n'avons pas tenté d'estimer rigoureusement sa précision.
L'inclinaison éventuelle est corrigée manuellement en insérant des bandes de papier (épaisseur environ 100 µm) sous les pieds du tourne-disque.
Pour vérifier que le gyromètre est orthogonal à l'axe du tourne-disque, nous mesurons simplement sa réponse à la rotation du plateau (idéalement, elle devrait être nulle). Ceci est réalisé en moyennant le signal et en soustrayant l'offset, le tout en l'espace d'une minute. La fidélité est meilleure que 0,05 °, mais ici encore nous n'avons pas estimé la précision.
L'utilitaire linmctool (voir [LINMCTOOL]) reçoit les données brutes:
# wget http://www.pabr.org/linmctool/linmctool-20110206.c # gcc --std=gnu99 -Wall linmctool-20110206.c -lusb -o linmctool # ./linmctool --timestamp | bzip2 > data.dat.bz2
copernitron-20110210.m est un script pour GNU Octave / MATLAB, avec les fonctions minimales suivantes :
lecture des fichiers enregistrés par linmctool ;
démodulation homodyne synchronisée avec les magnétomètres X et Y ;
estimation du défaut d'alignement entre le tourne-disque et le plan horizontal ;
Estimation simplifiée du défaut d'alignement entre le PS Move et le plateau tournant ;
estimation du champ magnétique résiduel. Ceci donne en fait une indication non pas sur le champ subi par les gyromètres, mais sur ses composantes radiales et tangentielles sur une circonférence à environ 80 mm de l'axe ;
mesure de la vitesse de rotation de la Terre, en tours par jour sidéral, avec un intervalle de confiance tenant compte du bruit aléatoire et des défauts d'alignement des gyromètres ;
estimation de l'angle entre le Nord géographique et le champ magnétique résiduel (qui peut différer du Nord magnétique).
Les figures ci-après présentent les mesures de la vitesse et de la direction de la rotation de la Terre obtenues à partir de chaque jeu de données et de chaque gyromètre horizontal (gX, gY). Le démodulateur fournit un nombre complexe qui est normalisé à la valeur attendue (cercle bleu :un tour par jour sidéral) et représenté avec l'origine des phases de la PLL en haut. N.B. : Les marges d'erreur (cercles rouges et verts) tiennent compte uniquement des effets connus : bruit aléatoire et défauts d'alignement des gyromètres.
Même avec des enregistrements de 17 heures, le processus de mesure n'est pas parfaitement fiable. Malheureusement nous ne pouvons pas faire varier la vitesse de rotation de la Terre pour vérifier la fidélité des résultats ; mais plusieurs éléments suggèrent que le signal détecté correspond bien à la rotation de la Terre plutôt qu'à des artefacts ou à d'autres phénomène physiques directionnels :
Les deux gyromètres horizontaux, gX et gY, fournissent deux résultats indépendants à partir de chaque enregistrement. Nous pouvons vérifier leur concordance (à un déphasage de 90 ° et aux erreurs de mesure près).
La répétabilité est testée en démodulant séparément plusieurs portions indépendantes d'un même enregistrement (cercles verts).
Nous pouvons modifier légèrement les alignements du tourne-disque avec le plan horizontal et avec le gyroscope pour vérifier que le signal démodulé pointe toujours vers le même azimut.
De même, nous pouvons pivoter le châssis du tourne-disque de 90 ° afin de vérifier que le signal ne correspond pas à une direction privilégiée des frottements mécaniques.
Dans tous les enregistrements, même avec des défauts d'alignement ou des champs magnétiques résiduels importants, le résultat obtenu reste à ±50 % de la valeur attendue.
Chaque enregistrement occupe environ 100 Mo. Pour télécharger, veuillez corriger l'extension de l'URL en ".dat.bz2".
stationary-magnet-off.dat. 11 heures de bruit d'un appareil immobile.
dd45eeehelm.dat. Le gyromètre X est mal aligné ; le gyromètre Y fournit une marge d'erreur exploitable.
dataset = dd45eeehelm
latitude = 48
rpm_nominal = 45
count = 9894401
duration = 5.5933e+04
Sample rate: 176.898 Hz (ignoring packet loss).
mX: Residual mag. north 2.3 µT at -0 ° CW from PLL origin.
mY: Residual mag. north 2.3 µT at 1 ° CW from PLL origin.
aX: Turntable tilt 0.011 ° up at 78 ° CW from PLL origin.
aY: Turntable tilt 0.013 ° up at 72 ° CW from PLL origin.
Rate fluctuation: 1057 ppm.
Using gyro gX.
Range: 12.175 °/s mean: -0.637 °/s stddev: 0.474 °/s.
Tilt: 0.135 ± 0.021 °.
Earth rotation rate: 0.668 rotations per sidereal day
±0.309 with 95% confidence.
True north: -10.4 ° clockwise from PLL origin.
Using gyro gY.
Range: 15.219 °/s mean: 0.005 °/s stddev: 0.406 °/s.
Tilt: -0.001 ± 0.021 °.
Earth rotation rate: 0.859 rotations per sidereal day
±0.105 with 95% confidence.
True north: 31.5 ° clockwise from PLL origin.
dd33alignedB.dat. Le courant des bobines est délibérément plus élevé que nécessaire (530 mA) afin de vérifier que l'expérience détecte bien la direction du vrai Nord et pas celle du champ magnétique local via des phénomènes indésirables.
dataset = dd33alignedB
latitude = 48
rpm_nominal = 33.333
count = 9894401
duration = 5.6350e+04
Sample rate: 175.589 Hz (ignoring packet loss).
mX: Residual mag. north 2.0 µT at -1 ° CW from PLL origin.
mY: Residual mag. north 2.0 µT at 1 ° CW from PLL origin.
aX: Turntable tilt 0.006 ° up at 53 ° CW from PLL origin.
aY: Turntable tilt 0.006 ° up at 65 ° CW from PLL origin.
Rate fluctuation: 1008 ppm.
Using gyro gX.
Range: 4.834 °/s mean: -0.535 °/s stddev: 0.474 °/s.
Tilt: 0.153 ± 0.029 °.
Earth rotation rate: 0.750 rotations per sidereal day
±0.269 with 95% confidence.
True north: -144.7 ° clockwise from PLL origin.
Using gyro gY.
Range: 4.566 °/s mean: 0.258 °/s stddev: 0.386 °/s.
Tilt: -0.074 ± 0.029 °.
Earth rotation rate: 0.547 rotations per sidereal day
±0.173 with 95% confidence.
True north: -137.2 ° clockwise from PLL origin.
dd45aligned.dat. Le tourne-disque et les capteurs sont soigneusement alignés. Nous soupçonnons que les fluctuations naturelles du champ magnétique terrestre font que le champ résiduel change de direction, ce qui rend la PLL peu fiable.
dataset = dd45aligned
latitude = 48
rpm_nominal = 45
count = 9894401
duration = 5.6344e+04
Sample rate: 175.607 Hz (ignoring packet loss).
mX: Residual mag. north 0.9 µT at -1 ° CW from PLL origin.
mY: Residual mag. north 0.9 µT at -1 ° CW from PLL origin.
aX: Turntable tilt 0.002 ° up at 93 ° CW from PLL origin.
aY: Turntable tilt 0.003 ° up at 147 ° CW from PLL origin.
Rate fluctuation: 1049 ppm.
Using gyro gX.
Range: 4.745 °/s mean: -0.629 °/s stddev: 0.460 °/s.
Tilt: 0.133 ± 0.021 °.
Earth rotation rate: 0.771 rotations per sidereal day
±0.302 with 95% confidence.
True north: -74.4 ° clockwise from PLL origin.
Using gyro gY.
Range: 4.029 °/s mean: 0.333 °/s stddev: 0.381 °/s.
Tilt: -0.071 ± 0.021 °.
Earth rotation rate: 0.521 rotations per sidereal day
±0.199 with 95% confidence.
True north: -68.9 ° clockwise from PLL origin.
{kind=link}
dd45tiltup115.dat. Le tourne-disque est délibérément incliné vers le haut dans la direction 115 °E en vue d'estimer le vrai Nord par rapport à une direction connue. Cette inclinaison semble perturber les mesures de phases d'une façon qui n'est pas encore bien comprise.
dataset = dd45tiltup115
latitude = 48
rpm_nominal = 45
count = 8199671
duration = 4.6695e+04
Sample rate: 175.602 Hz (ignoring packet loss).
*** PLL TILT ***
mX: Residual mag. north 1.1 µT at -39 ° CW from PLL origin.
mY: Residual mag. north 1.0 µT at -40 ° CW from PLL origin.
aX: Turntable tilt 0.065 ° up at -1 ° CW from PLL origin.
aY: Turntable tilt 0.062 ° up at 1 ° CW from PLL origin.
Rate fluctuation: 1013 ppm.
Using gyro gX.
Range: 4.834 °/s mean: -0.310 °/s stddev: 0.476 °/s.
Tilt: 0.066 ± 0.021 °.
Earth rotation rate: 1.225 rotations per sidereal day
±0.214 with 95% confidence.
True north: -167.7 ° clockwise from PLL origin.
Using gyro gY.
Range: 4.029 °/s mean: 0.190 °/s stddev: 0.374 °/s.
Tilt: -0.040 ± 0.021 °.
Earth rotation rate: 0.884 rotations per sidereal day
±0.158 with 95% confidence.
True north: -60.8 ° clockwise from PLL origin.
Améliorations techniques . Nos expériences commencent le plus souvent le soir pour des durées atteignant 17 heures. Le PS Move est attaché par des élastiques à un support en carton, et les pieds en caoutchouc du tourne-disque reposent sur une table en bois. Tous ces matériaux sont susceptibles de gonfler ou de se contracter sous l'effet des variations de température ou d'humidité ambiante. Des matériaux plus appropriés permettraient d'améliorer la stabilité géométrique du dispositif.
Modélisation mécanique des gyromètres MEMS vibrants . Nous avons supposé que nos gyromètres répondent instantanément aux variations de la vitesse et de la direction de leur rotation, ce qui revient à négliger le terme dépendant de dΩ/dt dans la formule de composition des mouvements. D'un côté, ceci semble raisonnable parce que les gyromètres MEMS vibrent typiquement à des fréquences supérieures de trois ou quatre ordres de grandeur à celle du tourne-disque. D'un autre côté, il est possible que la démodulation homodyne soit suffisamment sensible pour détecter des phénomènes dynamiques périodiques. Une meilleure modélisation pourrait améliorer les résultats et expliquer les anomalies de Figure 15, « dd45tiltup115.dat. Azimuth 115 °E en haut. ».
Modulation binaire plutôt que rotation continue . Pour ce projet notre objectif principal était de recourir exclusivement à des matériels courants. C'est ce qui à conduit à utiliser un joystick de jeu vidéo, un tourne-disque, et une modulation harmonique du signal cible. Mais l'approche de [MST2005], où le gyroscope est échantillonné au repos dans deux orientations opposées, évite la plupart des complications introduites par la rotation continue. Les lecteurs sont donc invités à imaginer des dispositifs mécaniques constitués d'objets de la vie courante capables de produire des trajectoires adéquates (bielle et manivelle ? moteur d'essuie-glace ? LEGO ?). N.B. : il n'est pas indispensable que le moteur soit piloté par l'ordinateur ; nous pouvons utiliser le magnétomètre pour déclencher l'échantillonnage à chaque fois que le gyroscope atteint une orientation appropriée.
Modéliser les effets du champ magnétique . Les bobines d'Helmholtz sont le seul élément de notre dispositif qui nécessite un peu de bricolage, et ceci contraste avec la simplicité du reste du projet. Il serait donc utile d'expérimenter avec des blindages magnétiques. Ou encore, en modélisant l'influence du champ magnétique sur les mesures, nous pourrions annuler son effet par calcul.
Pré-traitements non identifiés ? . Ce que nous avons considéré comme des données brutes issues des capteurs tout au long de cet article pourrait en fait avoir subi des pré-traitements inconnus au sein du PS Move. Par exemple, nous avons remarqué un pic à 88 Hz dans le spectre de bruit. Ceci suggère que les deux échantillons de chaque paquet Bluetooth sont traités différemment.
Mesure de la latitude . La latitude est obtenue à partir de la valeur connue de la vitesse de rotation de la Terre et d'une mesure de sa composante horizontale. Une autre approche consisterait à faire tourner un gyromètre dans le plan vertical du méridien.
Plusieurs modèles de PS Move ? . Comme mentionné plus haut (Section 4, « Estimations de faisabilité »), il y a au moins deux versions du PS Move sur le marché (il est fréquent que les détails de conception d'un produit industriel soient améliorés au cours de sa vie). Nous ne pouvons pas garantir que l'expérience fonctionnera avec des versions autres que CECH-ZCM1E ; mais on peut s'attendre à ce qu'elle fonctionne mieux avec les versions qui intègrent un blindage magnétique autour du gyroscope.
Autres appareils équipés de gyromètres . À notre connaissance, le PS Move a des gyromètres dotés de la meilleure gamme dynamique (16 bits) de son segment de marché. Mais il a aussi une étendue de mesure particulièrement large (±3000 °/s), ce qui est parfait pour des applications de suivi de mouvements, mais sous-optimal pour notre projet. De nombreux modèles de gyromètres MEMS ont une sortie auxiliaire "amplifiée" avec une étendue de mesure réduite. D'après [WIIBREW], les gyromètres du Wii MotionPlus ont une gamme dynamique de seulement 14 bits mais ils proposent un mode de fonctionnement avec une étendue réduite. Ceci devrait leur permettre de détecter la rotation de la Terre avec des performances comparables. S'il s'avérait possible de configurer aussi les gyromètres du PS Move pour fonctionner avec une étendue de mesure plus étroite, le temps d'acquisition pourrait probablement être réduit.
Application pour téléphones mobiles . Nous étudions la faisabilité de cette expérience avec des gyromètres de téléphones mobiles.
Détection des forces de marées ? . La Lune et le Soleil font fluctuer la gravité à la surface de la Terre d'environ 0,1 ppm. On pourrait tenter de mesurer cet effet avec des capteurs MEMS grand public, en utilisant des techniques similaires.
[LINMCTOOL] linmctool - Utilitaire Linux pour périphériques à détection de mouvement . http://www.pabr.org/linmctool/linmctool.fr.html .
[IFIXIT] PlayStation Move Teardown. http://www.ifixit.com/Teardown/PlayStation-Move-Teardown/3594/2#s17213.
[WIIBREW] Wiimote/Extension Controllers. http://wiibrew.org/wiki/Wiimote/Extension_Controllers#Wii_Motion_Plus.
[MST2005] Earth rotation measurement with micro-mechanical yaw-rate gyro. Measurement Science and Technology. 11. Novembre 2005 . http://iopscience.iop.org/0957-0233/16/11/024/. http://didel.script.univ-paris-diderot.fr/claroline/backends/download.php?url=L0FyY2hpdi9FeHBvc%2BlzL2VhcnRoX3JvdGF0aW9uX3NlbnMucGRm&cidReset=true&cidReq=36UAHB543.
[BMR] The effect of carouseling on MEMS IMU performance for gyrocompassing applications. Massachusetts Institute of Technology2009. http://dspace.mit.edu/handle/1721.1/51645.
A. Contexte historique
La recherche de preuves (ou de réfutations) expérimentales de la rotation de la Terre apparaît comme un fil conducteur important aux débuts de l'époque moderne. Comme c'est souvent le cas dans l'histoire des découvertes scientifiques, nous avons tendance à focaliser notre attention sur un évènement particulier (un jour, un lieu, un individu) et à le considérer comme un tournant historique. En l'occurrence, il s'agirait de la démonstration par Léon Foucault de son plus grand pendule sous la coupole du Panthéon en 1851. Mais les historiens révèle une chronologie plus étendue et riche en couleurs. Nous recommandons la lecture de [RIGGE] (en Anglais) ou de ses principales références, [GILBERT] (consultable en ligne) et [HAGEN].
Certains des prédécesseurs de Foucault ont imaginé des expériences pertinentes, mais n'avaient souvent pas à leur disposition la technologie nécessaire pour les réaliser. D'autres ont rapporté des résultats expérimentaux concluants, mais les experts d'aujourd'hui estiment rétroactivement que compte tenu du savoir-faire de l'époque, la marge d'erreur ne pouvait pas être satisfaisante. D'autres encore ont remarqué certains effets de la rotation de la Terre alors qu'ils travaillaient sur d'autres sujets, mais les ont considérés comme des artefacts indésirables.
N.B . [HAGEN], [GILBERT] et [RIGGE] parlent tous de "preuves" de la rotation de la Terre. Une preuve est un objet mathématique qui n'a de sens que dans un modèle spécifique ; au 19ème siècle, il s'agissait implicitement de la mécanique newtonienne. Au début du 20ème siècle, la notion de référentiel inertiel a été améliorée par la relativité générale, dont certaines conséquences pertinentes ici n'ont toujours pas été testées expérimentalement. Certaines personnes en profitent pour présenter à tort les résultats antérieurs comme faux, dans un sens mathématique. À titre de précaution, dans cet article, nous avons évité de présenter les mesures gyroscopiques comme des "preuves" définitives de la rotation de la Terre ; il faut plutôt les considérer comme des "indices" ou des "arguments" dans les débats permanents qui font avancer la physique.
En observant le ciel nocturne pendant quelques heures, on constate que la sphère céleste tourne autour de deux points fixes appelés les pôles célestes. Si nous voyons le monde tourner autour de nous, il est raisonnable de supposer humblement que c'est nous qui sommes en mouvement, et que l'essentiel du reste de l'univers est immobile. C'est pourtant le genre de raisonnement qui a conduit Galilée devant le tribunal de l'Inquisition en 1633. Après tout, dans l'Antiquité, il n'était pas du tout évident que les étoiles sont des objets massifs au même titre que notre Soleil. De plus, les seuls objets célestes qui paraissent indubitablement "grands" - le Soleil et la Lune - ont chacun un mouvement propre indépendant de celui des étoiles. Même avec l'avènement du télescope, et la prise de conscience que les autres planètes sont semblables à notre Terre, on pouvait encore légitimement avoir des doutes sur la nature des étoiles.
On apprendra avec surprise que la première tentative pour mettre en évidence la force de Coriolis engendrée par la rotation de la Terre, vers 1644, consista à tirer des boulets de canon vers le zénith - avec des résultats décevants, mais du moins sans faire de blessés.
À partir de 1790, on laissa tomber divers objets depuis des tours et dans des puits de mines pour comparer leurs trajectoires avec la verticale d'un fil à plomb. Mais pour en tirer des conclusions, plusieurs conditions devaient être remplies.
Il faut attendre que l'objet soit parfaitement immobile avant de le relâcher. Des microscopes étaient utilisés à cette fin. Ceci peut prendre jusqu'à 15 minutes.
L'objet doit être lâché par un procédé qui n'exerce ni couple ni force latérale.
Il est préférable de travailler la nuit pour s'affranchir des vibrations causées par les activités humaines.
L'objet doit être symétrique et homogène pour ne pas être dévié par la résistance de l'air. À défaut, on faisait flotter des boulets de canon dans un bain de mercure afin de choisir un point d'ancrage dans l'alignement du centre de gravité et du barycentre géométrique.
Il faut attendre que l'atmosphère soit au repos, ce qui peut prendre un temps considérable à l'intérieur d'une structure de grande dimension. Une cheminée calfeutrée d'une hauteur de 150 m fut construite dans un puits de mine. Certains expérimentateurs se limitaient à deux chutes par nuit.
Le fil à plomb doit être déployé immédiatement avant et après l'expérience afin de détecter les éventuelles déformations des bâtiments.
La simplicité du pendule de Foucault laisse à penser que n'importe qui peut mettre en évidence la rotation de la Terre en faisant balancer une pierre au bout d'une longue corde attachée à un arbre. Cette illusion a certainement contribué à l'engouement populaire pour le pendule dans les années 1850. Il a en fait fallu plusieurs années pour le mettre au point.
Comme dans les expériences de chute libre, la masse oscillante doit soit être symétrique et homogène, soit être orientée par flottaison dans un bain de mercure.
Le pendule doit être lâché par un procédé qui n'exerce ni couple ni force latérale, par exemple en brûlant un fil qui le retient.
Le fil doit être attaché au plafond sans générer de couple. En pinçant naïvement le fil dans un étau, on risque de créer des contraintes mécaniques anisotropes suffisantes pour faire dévier le pendule. Des pivots spéciaux, à base de lames de couteaux croisées ou d'aiguilles en équilibre sur des plateaux horizontaux, furent développés.
Le fil doit être léger et flexible. Pour soutenir le poids de son pendule de 28 kg, auquel s'ajoute la force centrifuge, Foucault choisit un fil de seulement 1,5 mm² de section. Ceci correspond à une tension supérieure à 180 MPa, probablement proche de la limite d'élasticité des aciers du 19ème siècle. D'après [FONVIELLE], dans les démonstrations publiques, il arrivait que le fil casse et "cingle le visage des spectateurs". Dans d'autres expériences, on obtint de meilleurs résultats avec des fils de fer épais qu'avec des fils d'aciers pourtant plus fins, probablement à cause de leur meilleure flexibilité.
Foucault recommandait d'utiliser un pendule d'au moins 10 m de hauteur. Avec des pendules de laboratoire (moins de 2 m), il faut injecter de l'énergie pour compenser la résistance de l'air. Ces astuces nuisent à la simplicité du pendule et exigent une conception rigoureuse pour éviter d'introduire des artefacts.
L'idée de monter un volant d'inertie sur un cardan remonte à 1817, mais c'est Foucault qui, le premier, a appliqué ce dispositif à l'étude de la rotation de la Terre en 1852. Le gyroscope est un instrument mécanique plus sophistiqué que le pendule, mais pour le physicien, c'est une façon plus élégante de démontrer la rotation de la Terre : une simple application de la loi de conservation du moment cinétique prédit qu'un gyroscope libre et sans frottements conservera une orientation constante par rapport aux étoiles lointaines.
On appelle maintenant gyroscope n'importe quel instrument qui mesure sa propre vitesse de rotation. Les hommes de l'art emploient plutôt le terme gyromètre.
On notera les gyromètres vibrants, le gyromètre à fibre optique, le gyrolaser ainsi que le gyromètre quantique et le gyromètre à ondes de matière. Ces appareils mesurent des vitesses de rotation, mais des travaux en cours visent à produire des gyromètres MEMS qui mesurent des angles directement.
[HAGEN] La Rotation de la Terre, Ses Preuves Mécaniques Anciennes et Nouvelles. Tipografia poliglotta vaticana. 1911.
[GILBERT] Les preuves mécaniques de la rotation de la Terre. Bulletin des sciences mathématiques et astronomiques, Série 2. 1. pp. 189-223. 1882. http://www.numdam.org/item?id=BSMA_1882_2_6_1_189_0.
[RIGGE] Experimental Proofs of the Earth's Rotation. Popular Astronomy. pp. 208-216, 267-276. 1913. http://adsabs.harvard.edu/abs/1913PA.....21..208R http://adsabs.harvard.edu/full/1913PA.....21..267R .
[FONVIELLE] Expérience du pendule de Léon Foucault au Panthéon de Paris en 1851. La Nature. 1887. http://cnum.cnam.fr/CGI/sresrech.cgi?4KY28.29/0413.